

通信世界网消息(CWW)3月29日,智源研究院在2025中关村论坛“未来人工智能先锋论坛”上发布首个跨本体具身大小脑协作框架RoboOS与开源具身大脑RoboBrain,可实现跨场景多任务轻量化快速部署与跨本体协作,推动单机智能迈向群体智能,为构建具身智能开源统一生态加速场景应用提供底层技术支持。
在具身场景中,长程操作任务是机器人执行复杂任务的核心能力之一。具身大脑RoboBrain融合了机器人任务规划、可操作区域感知、轨迹预测的三维能力,通过将抽象指令映射为具象动作序列,增强长程操作任务的能力。
RoboBrain由三个模块组成:用于任务规划的基座模型、用于可操作区域感知的A-LoRA模块和用于轨迹预测的T-LoRA模块。在推理时,模型首先感知视觉输入,并将输入指令分解为一系列可执行的子任务,然后执行可操作区域感知和轨迹预测。RoboBrain采用多阶段训练策略,使其具备长历史帧记忆和高分辨率图像感知能力,进而提升场景感知和操作规划的能力。
RoboBrain 在任务规划、可操作区域感知和轨迹预测评测任务中均表现出卓越性能。
在任务规划方面,RoboBrain在不牺牲通用能力的前提下,在机器人规划评测集OpenEQA、ShareRobot(自建)和RoboVQA上多个维度优于GPT-4V、Claude3等6个当时领先的闭源/开源MLLMs。
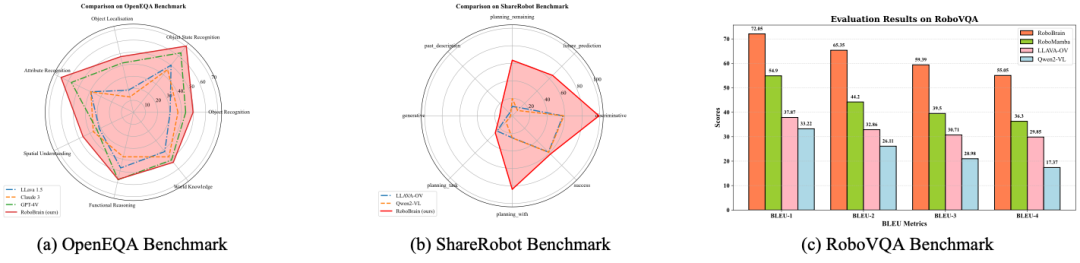
RoboBrain在具身规划评测基准上的性能
在可操作区域感知方面,RoboBrain在AGD20K测试集上的平均精度超过了当时最先进的开源模型Qwen2-VL,验证了其在指令理解和物体属性方面的卓越能力。
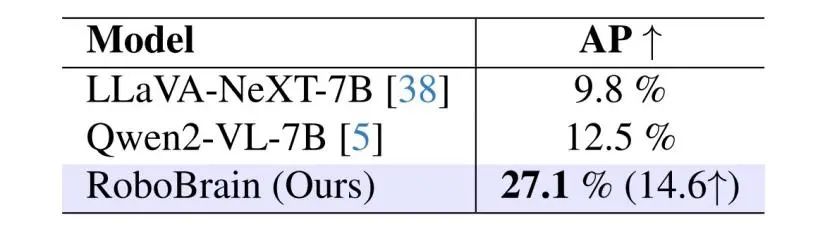
RoboBrain在可操作区域感知基准上的性能
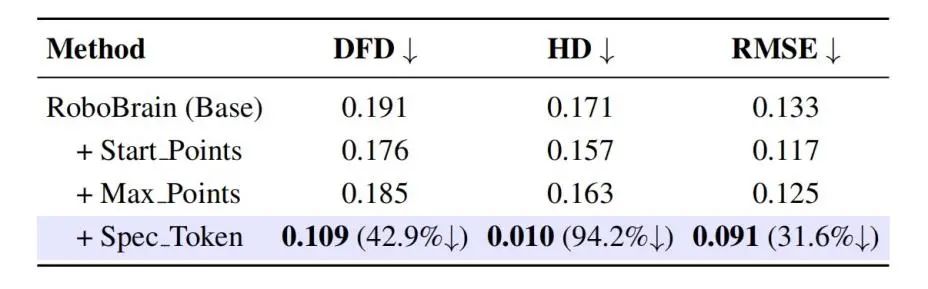
RoboBrain在轨迹预测基准上的性能
在轨迹预测方面,RoboBrain预测的操作轨迹具有与真实轨迹较高的相似度,展现了其在轨迹预测中的高精度和稳定性。RoboBrain的未来迭代版本会持续提高轨迹预测的能力。
目前,RoboBrain能够解读人类指令和视觉图像,以生成基于实时图像反馈的行动计划和评估,预测每一步的轨迹并感知相应的可操作区域。具体而言,RoboBrain 能够有效利用环境信息和交互对象的状态——无论是从第一人称还是第三人称视角捕捉的图像——生成针对不同类型机器人操作任务的任务规划,并基于人类指令和视觉信息,提供合理的可操作区域,并能在不同场景中表现出良好的泛化能力,生成既可行又合理的轨迹。

具身大脑RoboBrain、小脑技能库以及跨机器人数据中枢,是跨本体框架RoboOS的核心要素。具身大脑RoboBrain,负责全局感知与决策,构建动态时空感知、规划指导和反馈纠错机制;小脑技能库,负责低延迟精准执行,实现柔性与精密操作等;跨机器人数据中枢,负责实时共享空间、时间和本体记忆,为决策规划与优化协作操作提供信息支持,从而形成感知-认知-决策-行动的闭环。
